China Road Transport Academy


中国道路运输网刊发“中国电动汽车百人会”专场“智能汽车论坛”演讲核心内容。本专场共有10位嘉宾发表对产业发展及未来方向的真知灼见。以下来自上海拿森汽车电子有限公司CEO陶喆精华摘录。要点如下:
1、单踏板one—pedal方案,可能在紧急情况下导致安全隐患。
2、拿森独创的NBooster智能制动系统可以把制动消耗的30%总能耗中的20%—25%能量全部回收回来,车辆实际续航可增加了10%以上。
3、应对自动驾驶L3、L4级要求,拿森有完整的线控制动解决方案,采用自主开发的NBooster智能制动和稳定控制系统,共同组成了应对未来L3、L4的高度自动驾驶的线控制动解决方案。
4、上海拿森的发展,致力于成为自主可控的中国线控底盘领导者
无论从L1到L4还是L5,所有智能化的功能都依赖于线控底盘才能得到最终的执行。在国务院发布的《新能源汽车产业规划(2021—2035)》,明确提出来要攻克线控执行系统作为“卡脖子”的核心技术。现在基本达成一个共识,大家都认为线控执行端是自动驾驶非常重要的环节,无线控,不自动驾驶。
最近比较热门的话题,加速失控导致了一些安全事件。为什么会加速失控?如果采用单踏板one—pedal方案,即右边油门踩下去是加速、往回收时是减速,这即是它把传统意义上的加速和减速、在两个踏板上的功能集中在了一个踏板。这会导致什么问题呢?会导致在应急场景下驾驶员有可能误把油门踏板当成制动踏板。为什么设计one—pedal模式呢?众多周知,新能源汽车最大的优势相比燃油车就是有电驱动系统,相比燃油车可以更好地实现能量回收,所以各大主机厂都竞相采取各种各样的方案最大量回收制动能量。无论燃油车还是电动汽车,在整个生命周期里能量的30%是被制动系统消耗了,所以如何能把这30%的能量有效地回收回来,成为新能源汽车非常大的核心竞争力。
但是one—pedal有什么副作用呢?就是它需要改变用户正常驾驶习惯。通常来讲,传统意义的汽车制动是左面踏板、油门是右面踏板。在正常驾驶模式下,用户有足够多时间去反应,但是在应急情况下,用户可能由于one—pedal经常加速、减速在一个踏板上,他可能反应不过来,他已经忘记了到底哪个踏板是制动、哪个踏板是加速,而错误的把加速踏板当成制动,可能存在安全隐患。
那么是否有既增加能量回收、降低能耗,又不改变驾驶员驾驶习惯的一个两全方案呢?实际上拿森创新开发了协调式的能量回收系统NBooster智能制动系统。这套系统可以显著地提升制动能量回收。刚刚提到整个制动占据汽车所有能量消耗的30%,使用这套系统以后可以把其中的20%—25%的能量全部回收回来。换句话说,在公路交通里大多数场景的能量都可以通过这套系统有效地回收回来。同时这套系统可以达到智能化等级的L3级,响应速度(TTL)、抱死压力可以做到200毫秒,瞬间就可以让车辆刹住。同时NBooster系统相比原来传统的制动系统寿命长、售后无需维护,所以这套系统是既可以提高制动能量回收、优化制动性能,同时保障车辆安全的优选方案。
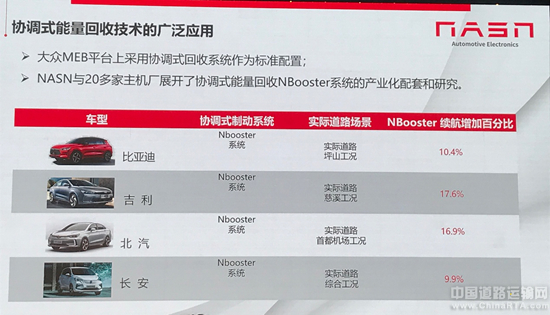
对标全球来看,大众下一代针对全球电动汽车的平台MEB也采用了类似的协调式能量回收系统作为标准配置。目前,拿森与国内20多家主流的主机厂开展了多种类型的协调式能量回收的产业化配套和研究。包括拿森跟行业主流新能源主机厂像比亚迪、吉利、北汽、长安分别开展了NBooster装车合作,在实际道路场景下对能量回收和续航做了测试,可以看到,搭载了NBooster的系统协调式能量回收系统以后,车辆在实际续航上分别增加了10%到15%左右,证明这套协调式的能量回收系统对于增加新能源汽车的续航里程和体验具备较大的实际效果,有效地提升用户驾驶体验。
高度智能驾驶系统对线控系统提到的一个重大课题就是失效安全备份。我们认为自动驾驶实现L3、L4级对制动驾驶有三大要求:一是行车制动系统需要备份。二是基本的车身稳定控制需要备份。三是驻车制动系统需要备份。
应对自动驾驶L3、L4级要求,拿森有完整的线控制动解决方案,采用自主开发的NBooster智能制动和稳定控制系统,共同组成了应对未来L3、L4的高度自动驾驶的线控制动解决方案,该方案包含了六大冗余特征和备份特征,包含线控制动的冗余备份,二是基本车身稳定的备份,驻车的备份,还有轮速和车速解析的备份,NBooster和ESC的备份,以及系统间通讯和交互的备份,所有的重要环节备份,确保了制动系统作为车辆的最后一个安全的环节,能够保障驾驶员的生命安全。
此外,应对自动驾驶L3、L4级的要求,拿森提供全冗余的线控转向系统,从感知到通讯,到MCU算法、处理,到域控制器,到最后的电机驱动,全部都是双路控制,助力八大失效模式。
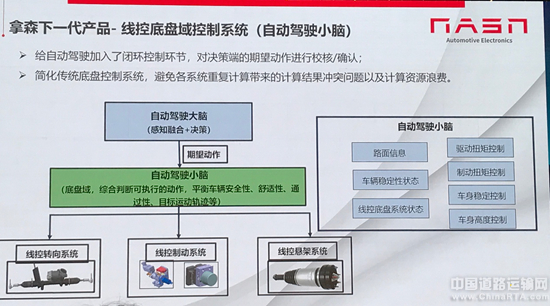
产业正在经历第一代分布式架构向第二代跨域集中式架构的变化过程,在这个变化过程中,拿森的产品布局将会坚持自主开发线控底盘的域控制系统,我们也把它叫做自动驾驶的“小脑”。
这个怎么解释呢?大家通常所说的自动驾驶“大脑”,“大脑”主要功能在于,一个是收集外界感知的信息,对感知的信息进行融合,融合了以后来做算法和路径规划,这个路径规划的指令就是你期待的整车未来自动驾驶的动作,这个动作会发给自动驾驶的“小脑”,“小脑”做什么呢?是综合判断可执行的动作,对于车辆的安全性、舒适性、通过性和目标的运动轨迹来做平衡,所以自动驾驶“小脑”需要收集路面的信息,来判断车辆稳定的控制状态,以及对驱动力矩、制动和车身稳定以及车身高度,在车辆的纵向、横向和垂直三个维度进行全域控制。
在线控底盘域控制系统里,拿森希望跟上下游合作伙伴是一个开放的合作模式,有三个合作模式:一是“大脑”和“小脑”相对独立开发。二是“大脑”的软件集成到“小脑”域控制系统里。三是“小脑”软件集成到“大脑”的ECU当中。
上海拿森的发展,致力于成为自主可控的中国线控底盘领导者。围绕汽车智能化,公司布局了整个未来自动驾驶所需的、完整的线控底盘核心产品,包含智能制动系统可以满足整车智能的L2到L3级,包含ESC车身稳定控制系统,包含DP电动转向,以及应对未来集中式的线控底盘的域控制器,即自动驾驶“小脑”,这个产品可以达到智能化L5等级。
在此我们呼吁:提升线控底盘国产化率。在线控制动领域如ESC车身稳定控制系统里,国产化率低于1%,需要引起行业高度重视、集中突破自主产业链目前不完整的现状。(本网依据速记整理,有删节,速记未经本人审核)